|
Consideremos dois planos  e e  , a que chamamos plano
móvel e fixo,
respectivamente, e imaginemos que se desloca
sobre . , a que chamamos plano
móvel e fixo,
respectivamente, e imaginemos que se desloca
sobre .
Mais sugestivamente, imaginemos que o plano
é o plano de
uma
mesa e que é uma placa plana de
plástico (transparente)
indeformável que deslocamos sobre a mesa. Nos instantes
 a placa
ocupará
determinadas
posições
sobre , que designamos sucessivamente por a placa
ocupará
determinadas
posições
sobre , que designamos sucessivamente por
 . .
Pontos e rectas de serão designados por letras
latinas
maiúsculas  e minúsculas e minúsculas
 ,
respectivamente. No movimento de sobre um ponto ,
respectivamente. No movimento de sobre um ponto
 ocupará
sucessivamente as posições ocupará
sucessivamente as posições
 em
, uma recta em
, uma recta  de ocupará
sucessivamente as posições de ocupará
sucessivamente as posições
 em
, e
anàlogamente para qualquer outra figura de
. em
, e
anàlogamente para qualquer outra figura de
.
Pontos e rectas fixas de serão designados por letras
latinas
minúsculas  e por letras gregas e por letras gregas
 ,
respectivamente. O movimento de sobre
, será representado pela
notação ,
respectivamente. O movimento de sobre
, será representado pela
notação  . .
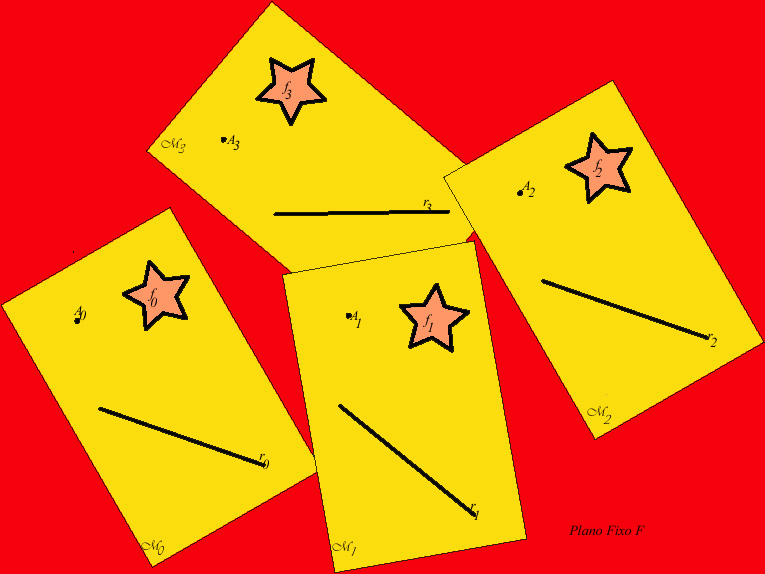
Na figura seguinte ilustramos o que acabamos de referir,
representando, para maior clareza de exposição, o plano
por
um rectângulo limitado amarelo, transportando consigo um ponto  , uma recta e uma estrela , uma recta e uma estrela  . O plano
é o plano
vermelho. . O plano
é o plano
vermelho.
|
|
|
Durante este movimento, ambos os planos se mantêm
indeformáveis,
isto é, as distâncias entre os pontos de cada um
mantêm-se
inalteradas. Sendo assim, não é difícil mostrar
que esse
movimento fica completamente determinado conhecendo o movimento de
dois quaisquer dos pontos de .
Consideremos então dois pontos
 que, para duas
posições sucessivas arbitrárias de
em
, ocupam as
posições
que, para duas
posições sucessivas arbitrárias de
em
, ocupam as
posições  e e  , em
, como na figura
seguinte: , em
, como na figura
seguinte:
|
|
|
Através do ponto médio do segmento  traçamos a
perpendicular a este segmento, e, anàlogamente, através
do
ponto médio do segmento  a respectiva perpendicular.
Seja  o ponto de
encontro destas duas perpendiculares.
Temos então que (porquê?):
Os triângulos  e e
 são pois
iguais e daí que: são pois
iguais e daí que:
Vemos portanto que, por
uma rotação em torno de  , o ponto , o ponto  será
transformado em será
transformado em  e simultâneamente, e simultâneamente,  em em  . Como a
posição de em fica completamente
determinada pelas posições de dois dos seus pontos,
concluímos que: . Como a
posição de em fica completamente
determinada pelas posições de dois dos seus pontos,
concluímos que:
O
movimento de em , da posição
 para
a
posição para
a
posição  pode ser obtido por
uma rotação em torno de um
certo ponto fixo , que se chama por
isso, o centro de
rotação. pode ser obtido por
uma rotação em torno de um
certo ponto fixo , que se chama por
isso, o centro de
rotação. |
O que acabamos de dizer
é independente das posições de
e
. Se
estas
posições se tornam infinitamente
próximas, obtemos resultados aplicáveis a cada instante
do
movimento contínuo de sobre . A corda converge então para a
tangente à trajectória de , e a normal a essa corda, através do seu
ponto médio, converge para a normal à trajectória
de que passa em . Portanto:
Quando um plano se
desloca continuamente sobre um
plano , as normais às
trajectórias de todos os seus pontos
passam, em cada instante, por um mesmo ponto. O sistema executa nesse
instante uma rotação infinitesimal em
torno desse ponto que, por isso, se chama o centro instantâneo de
rotação.
|
Para além das
trajectórias dos pontos de , é importante
estudar a envolvente, no plano fixo, das diversas
posições que
uma recta (ou uma outra qualquer curva) de
ocupa, quando
se move sobre
. Aqui o resultado
essencial é
o seguinte:
|
Quando um plano se desloca continuamente sobre um
plano , as normais às envolventes das
rectas (e outras
curvas) de ,
nos pontos de contacto (pontos característicos) com essas rectas
(ou
curvas), passam todas pelo centro instantâneo de
rotação. Esses pontos
de contacto chamam-se pontos
característicos da linha considerada. |
Por outras palavras: o
ponto em que (a posição de) uma recta
de , num certo instante, toca a sua
envolvente em , é o pé da
perpendicular baixada do centro instantâneo de
rotação sobre essa
recta.
Vamos ver que, de facto,
assim é. Para determinar o ponto
característico, onde uma recta móvel  toca, numa das suas
posições, a curva envolvente das suas sucessivas
posições em
, consideremos uma
posição muito próxima toca, numa das suas
posições, a curva envolvente das suas sucessivas
posições em
, consideremos uma
posição muito próxima  dessa
recta. Suponhamos que estas duas rectas, se intersectam num ponto dessa
recta. Suponhamos que estas duas rectas, se intersectam num ponto  de , e seja
de , e seja  o ponto de que corresponde ao ponto . o ponto de que corresponde ao ponto .
|
|
|
varia sobre ao mesmo que tempo que varia sobre e, no limite, quando se justapõe a , ambos os
pontos convergem para o mesmo ponto de , que é exactamente o
ponto característico de .
Mas, como sabemos, as perpendiculares aos segmentos  , que
passam nos respectivos pontos médios, passam todas pelo centro
de
rotação . Por outro lado, as rectas , que
passam nos respectivos pontos médios, passam todas pelo centro
de
rotação . Por outro lado, as rectas  e e  são normais
às trajectórias desses pontos. Portanto no limite, a
normal à
recta , no seu ponto
característico , passa pelo centro instantâneo de
rotação . são normais
às trajectórias desses pontos. Portanto no limite, a
normal à
recta , no seu ponto
característico , passa pelo centro instantâneo de
rotação .
Em particular, suponhamos que uma linha (recta ou uma outra curva)
do plano móvel está condicionada a passar sempre por um
certo
ponto fixo de (que é pois a envolvente das
sucessivas
posições dessa linha). Então, para uma
posição instantânea
de , a normal a essa linha, elevada a
partir desse ponto fixo, passa pelo centro instantâneo de
rotação.
Como veremos nos vários exemplos que analisaremos em breve,
estes
princípios permitem construir geomètricamente:
- o
centro instantâneo de rotação;
- as normais às trajectórias, em , dos pontos de
; e ainda,
- os pontos característicos em que as (sucessivas
posições das) linhas
transportadas por tocam as suas envolventes.
Nesses exemplos, o movimento
será definido:
- pelas trajectórias de dois pontos de
- pela trajectória de um ponto e pela envolvente de
uma linha (que pode reduzir-se a um ponto)
- pelas envolventes de duas linhas, que compreende o caso em
que essas envolventes se reduzem a pontos
- por um ponto pelo qual uma linha de
deve passar e pela
trajectória
de um ponto
- por um ponto pelo qual uma linha de
deve passar e pela
envolvente de uma linha de .
Veremos de seguida
várias aplicações
geométricas dos princípios atrás enunciados,
designados conjuntamente pelo chamado "método
das normais".
|
|







